











![]()
The aim of this plugin is to save time and energy for giving a realistic and smooth IK solution for various types of animals using only simple animation Blueprints.
The plugin aims to provide IK to different types of animals such as
Quadrupeds : Wolves , horses etc
Bipeds : T-Rex , birds , humans etc
Spiders : Multi-legged creatures such as spiders and scorpions etc
Snakes : Snakes & Worms etc
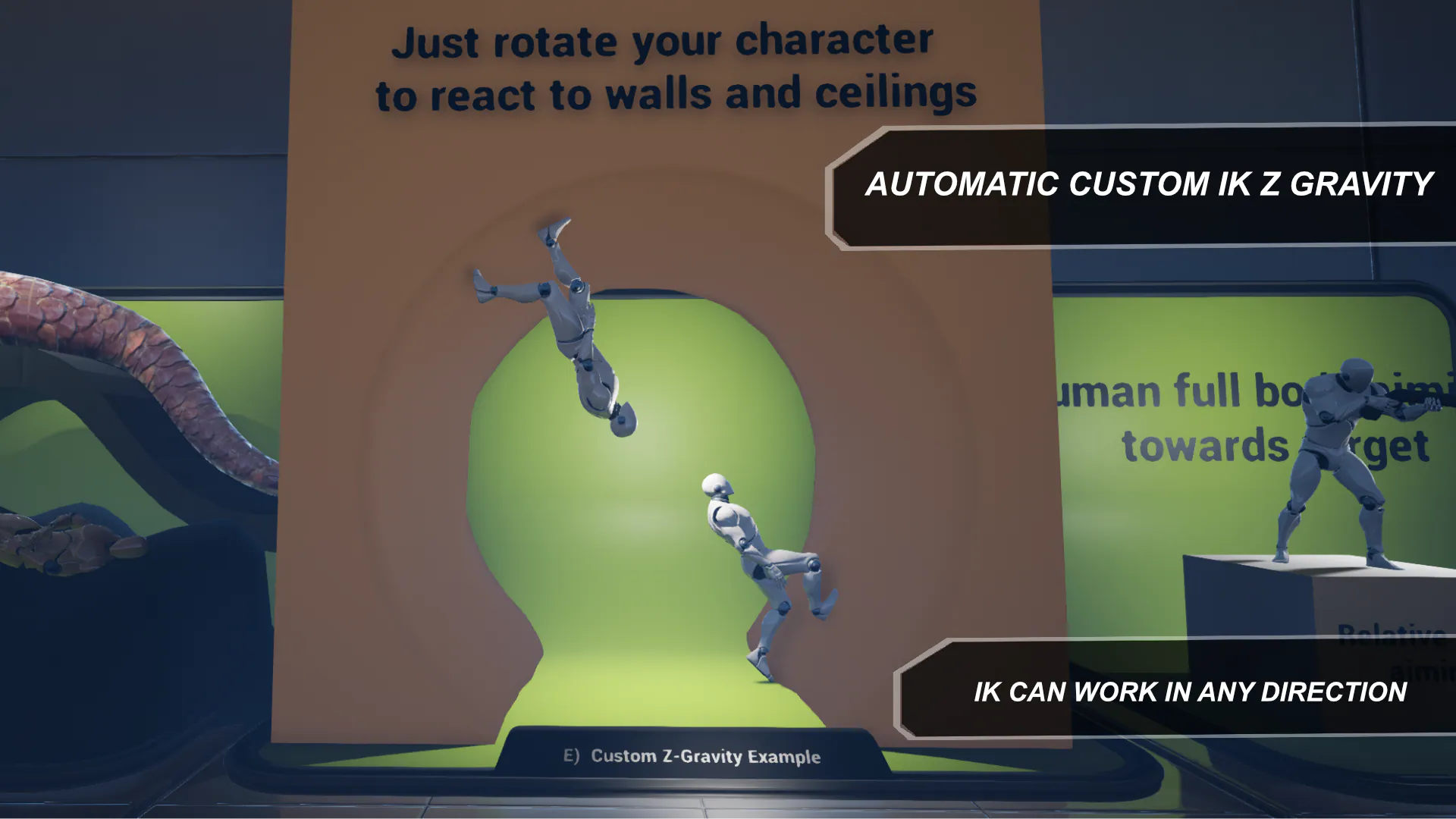
A universal aim/look-at solver that works on any kind of creature or character!
Technical Details
[Note : New updates are only available in every last 3 engine versions.]
Features:
Provides foot and spine IK for animals of quadruped,biped,spider and snake types.
An advanced universal fullbody aiming/look at solver that modifies any character to aim towards a target.
One of the best VR focused tools to get high quality VR character IK solving with tons of examples and community support.
DragonIK Physanims, an advanced and unique feature to easily get high quality physical animations and hit reactions. An alternative to engine’s in-built physical animation system.
Code Modules:
DragonIKPlugin [Runtime]
DragonIKPluginEditor [UncookedOnly]
Number of Blueprints: 3 Animation Blueprints (Dragon_SpineSolver, Dragon_FootSolver, Dragon_AimSolver)
Number of C++ Classes: 3 Main classes (AnimGraphNode_DragonFeetSolver.cpp, AnimGraphNode_DragonSpineSolver.cpp and AnimGraphNode_DragonAimSolver.cpp) and one static support class [DragonIK_Library]
Network Replicated: Yes
https://www.unrealengine.com/marketplace/en-US/product/dragon-ik-animal-inverse-kinematics




Reviews
There are no reviews yet.